Nous utilisons des cookies !
Notre site web utilise des cookies. Nous les utilisons pour vous offrir une meilleure expérience de navigation, analyser le trafic du site, personnaliser le contenu et diffuser des publicités ciblées.
Pour en savoir plus sur la manière dont nous utilisons les cookies et comment les gérer, cliquez sur « Paramètres des cookies ».
Préhenseurs magnétiques électroniques
Résultats de la recherche
[Résultats de la recherche texte de la page ]
Vos résultats dans : pages, produits et documents
Faites défiler pour tout voir. Vous n'avez pas trouvé ce que vous cherchiez ?
Essayez un autre terme de recherche ou contactez-nous.
Vouliez-vous dire:
{{suggestion.Description}}
,
?

- {{filter.Description}}


Aucun résultat trouvé
Nº d'article:
Stock:
{{item.ItemStock.Stock ? item.ItemStock.Stock : '0'}}
Clé de produit:
Trouvé dans
{{item.ItemVariations.length > 0 && item.ItemVariations[0].TitleX.length > 0 ? item.ItemVariations[0].TitleX : ItemVariationX}}:
{{item.ItemVariations.length > 0 && item.ItemVariations[0].TitleY.length > 0 ? item.ItemVariations[0].TitleY : ItemVariationY}}:
Prix
Quantité
Prix ??par unité
{{itemRebate.AmountStart}}
{{itemRebate.AmountStart < itemRebate.AmountEnd ? " - " + itemRebate.AmountEnd : " + "}}
[Résultats de la recherche texte de la page ]
Vos résultats dans : pages, produits et documents
Faites défiler pour tout voir. Vous n'avez pas trouvé ce que vous cherchiez ?
Essayez un autre terme de recherche ou contactez-nous.
Application des outils magnétiques d'outillage robotique
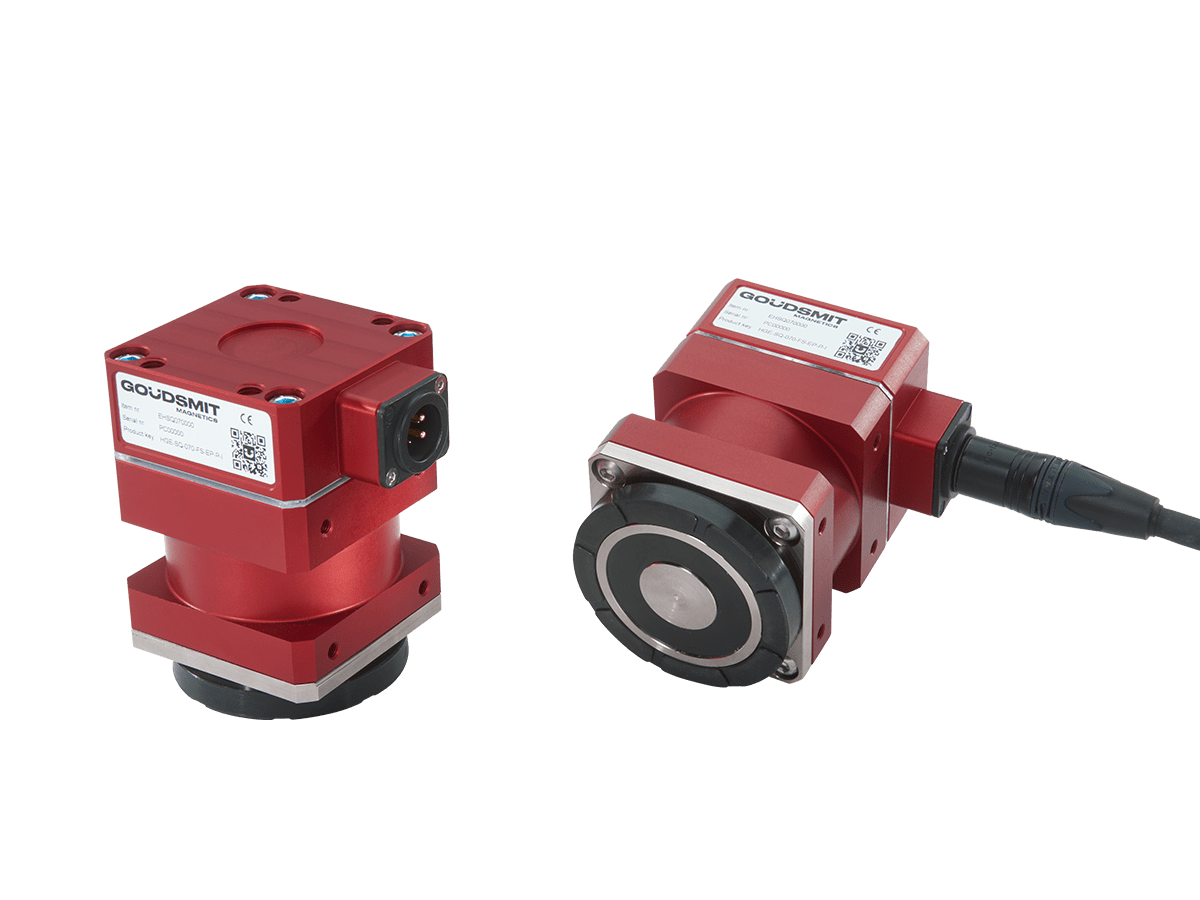
Les préhenseurs électromagnétiques constituent l’outillage robotique parfait pour les applications exigeantes demandant vitesse, précision et retour de capteurs. Par exemple, des robots dont la tâche consiste à charger et décharger des systèmes tels que des presses plieuses, des systèmes de soudure au laser, des tables de découpe ou des CNC et des machines de poinçonnage.
La commutation se fait en basculant électroniquement les pôles magnétiques. De cette manière, le préhenseur magnétique se saisit d’une pièce ou la libère. La conception bistable assure que les pièces restent fixées au préhenseur, même en cas de panne de courant.
Un outillage robotique idéal pour l’automatisation en l’absence de systèmes à air comprimé. Ce préhenseur électronique innovant fonctionne efficacement avec une source de courant continu de 24 V et ne nécessite que 100 W pour la commutation électromagnétique, en moins de 350 millisecondes. Ces temps de cycle accélérés augmentent significativement votre productivité. L’absence de pièces mobiles fait du préhenseur électronique un appareil extrêmement durable et capable d’atteindre 10 millions de commutations sans difficulté.
Commutation et contrôle du E-Gripper
Grâce aux instructions fournies dans le manuel d’installation, il est simple de connecter un préhenseur électronique. Il n’utilise qu’un seul câble pour l’alimentation et les signaux logiques à l’API. Le manuel présente également les différents états ou modes dans lesquels le préhenseur électronique peut se trouver.
Les préhenseurs électroniques Goudsmit sont équipés de capteurs pour des fonctions telles que :
- détection on/off : pour informer l’API de l’état dans lequel le préhenseur se trouve actuellement
- détection de présence de produit : pour vérifier si le préhenseur manipule une pièce
- affichage de la température
Facteurs affectant la force de levage magnétique
Le préhenseur électronique est conçu pour manipuler tous types de produits et pièces ferromagnétiques. La force de prise dépend des propriétés magnétiques ainsi que de la composition chimique du matériau manipulé. La force de levage peut-être plus faible avec des métaux autres que l’acier à faible teneur en carbone. Merci de vous référer à l’aperçu ci-dessous.
Matériau / Efficacité
- Acier non allié à faible teneur en carbone (< 0,3 % C) tel que le Fe360 ou le Fe510 : 100 %
- Acier au carbone non allié (0,3 – 0,5 % C) tel que le C15 ou le C45 : 80 - 90 %
- Acier d’outillage allié à haute teneur en carbone (0,5 – 1,8 % C) : 70 - 80 %
- Acier inoxydable magnétique (ferritique, martensitique) tel que l’AISI430 : 60 - 75 %
- Fonte (> 1,8 C) : 45 - 50 %
- Nickel : 30 - 50 %
- Acier inoxydable AISI304 : 1 - 3 %
- Acier inoxydable austénitique tel que l’AISI316, le bronze, l’aluminium, le cuivre : 0 %
En plus du matériau de la pièce, les facteurs suivants contribuent également à une réduction de la force de prise :
- Entrefer entre la pièce et le préhenseur électronique. Les surfaces non magnétiques comme des revêtements, des films, de la rouille ou de la saleté, ou encore la rugosité de la surface, peuvent être à l’origine d’un entrefer et d’une réduction de la force de prise.
- Surface de contact. Placer la pièce en contact direct et sur toute la surface des pôles magnétiques permet d’atteindre la force de prise maximale. En cas de couverture partielle ou de contact réduit, par exemple en cas de perforation de la pièce ou si celle-ci est difficile à toucher, la force de prise diminue.
- Épaisseur de la pièce. Les feuilles de matériaux fines deviennent magnétiquement saturées. Ainsi, le champ magnétique ne peut pas être employé dans sa totalité et la force de prise diminue.
- Température. La force magnétique est réduite à la fois en cas de température ambiante élevée (> 30 °C) et en cas de température élevée du produit (40 - 80 °C). Une commutation fréquente (> 4 cycles/min) fera également augmenter la température du système interne de l’aimant.
- Forces d’accélération. Lorsque la pièce se déplace rapidement, les forces d’accélération peuvent affecter négativement la force de prise. Assurez-vous que les forces d’accélération de la pièce sont toujours significativement plus faibles que la force de prise.
- Raideur ou flexibilité de la charge. Des charges longues et flexibles peuvent fléchir. L’effet de déflexion de l’aimant peut réduire significativement la force de prise. Ajoutez suffisamment de préhenseurs magnétiques sur plusieurs points de prise pour empêcher le fléchissement. Vous pouvez également équiper les préhenseurs magnétiques d’une suspension flexible pour absorber la déflexion.

Les préhenseurs électromagnétiques vous aident à manipuler vos pièces ferromagnétiques de manière durable, efficace et sécurisée. Dans un environnement de production intelligent, vitesse et précision sont des qualités nécessaires pour les préhenseurs magnétiques ou end effectors. L’efficacité énergétique et la sécurité sont également extrêmement importantes.